







PRODUCT DETAILS
Description
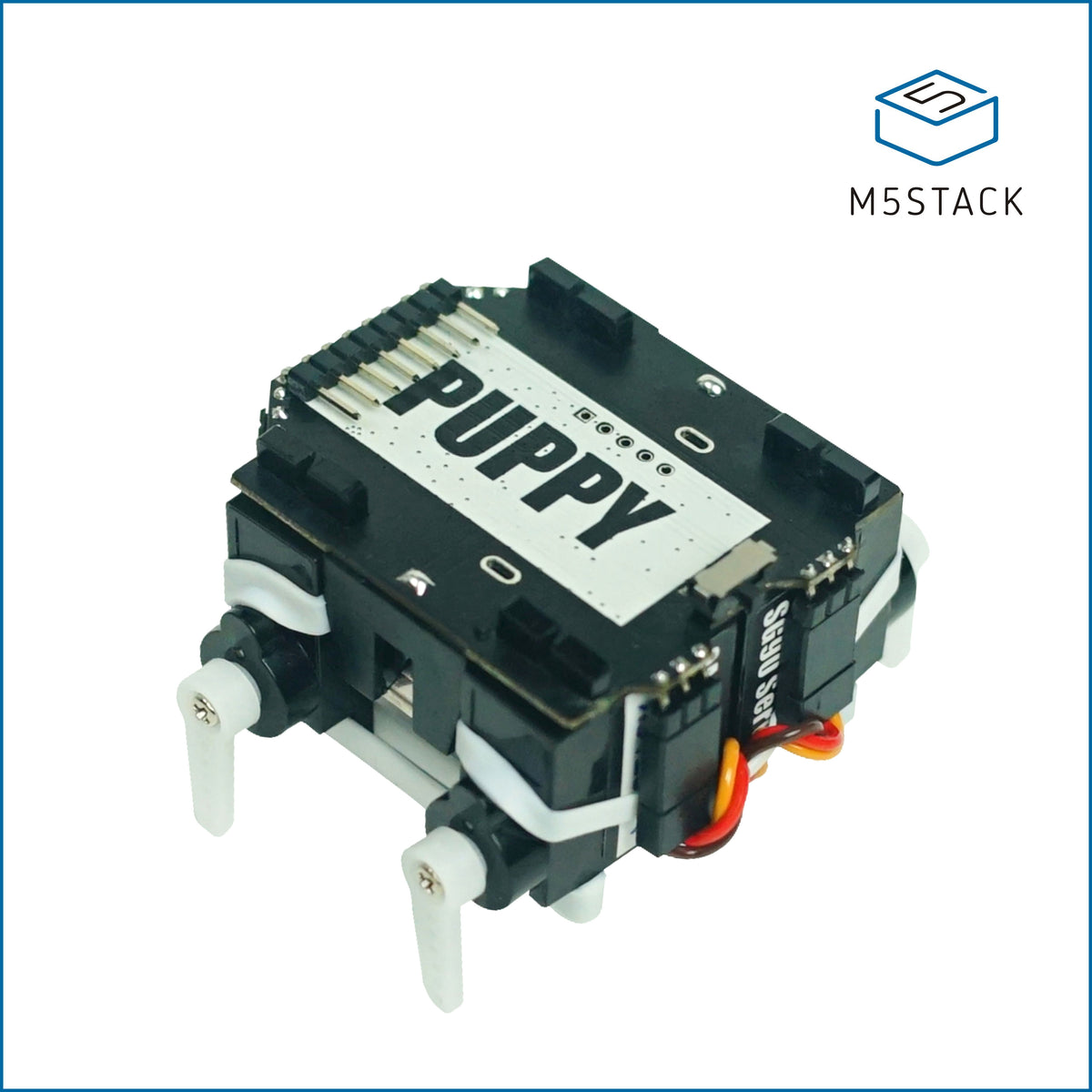
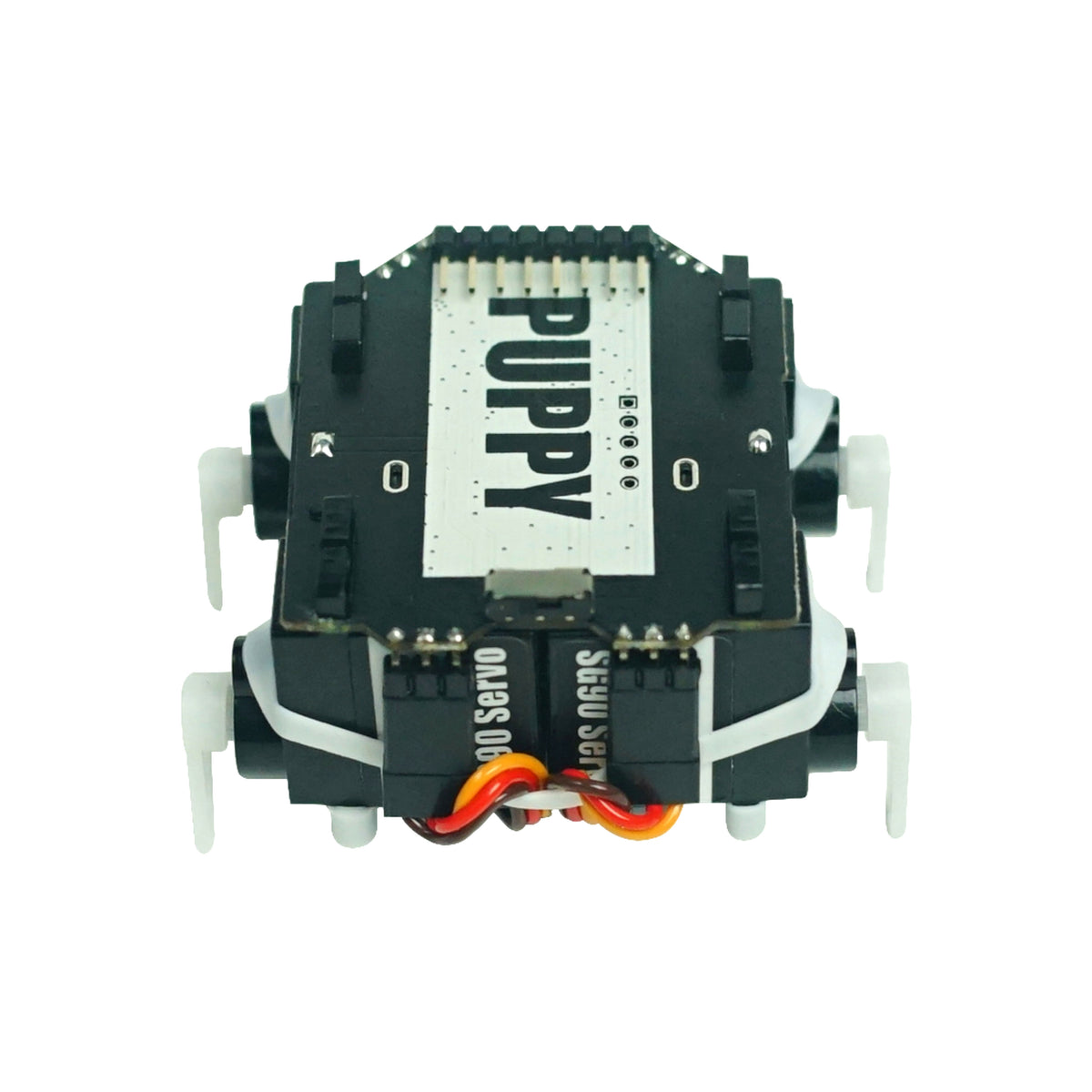
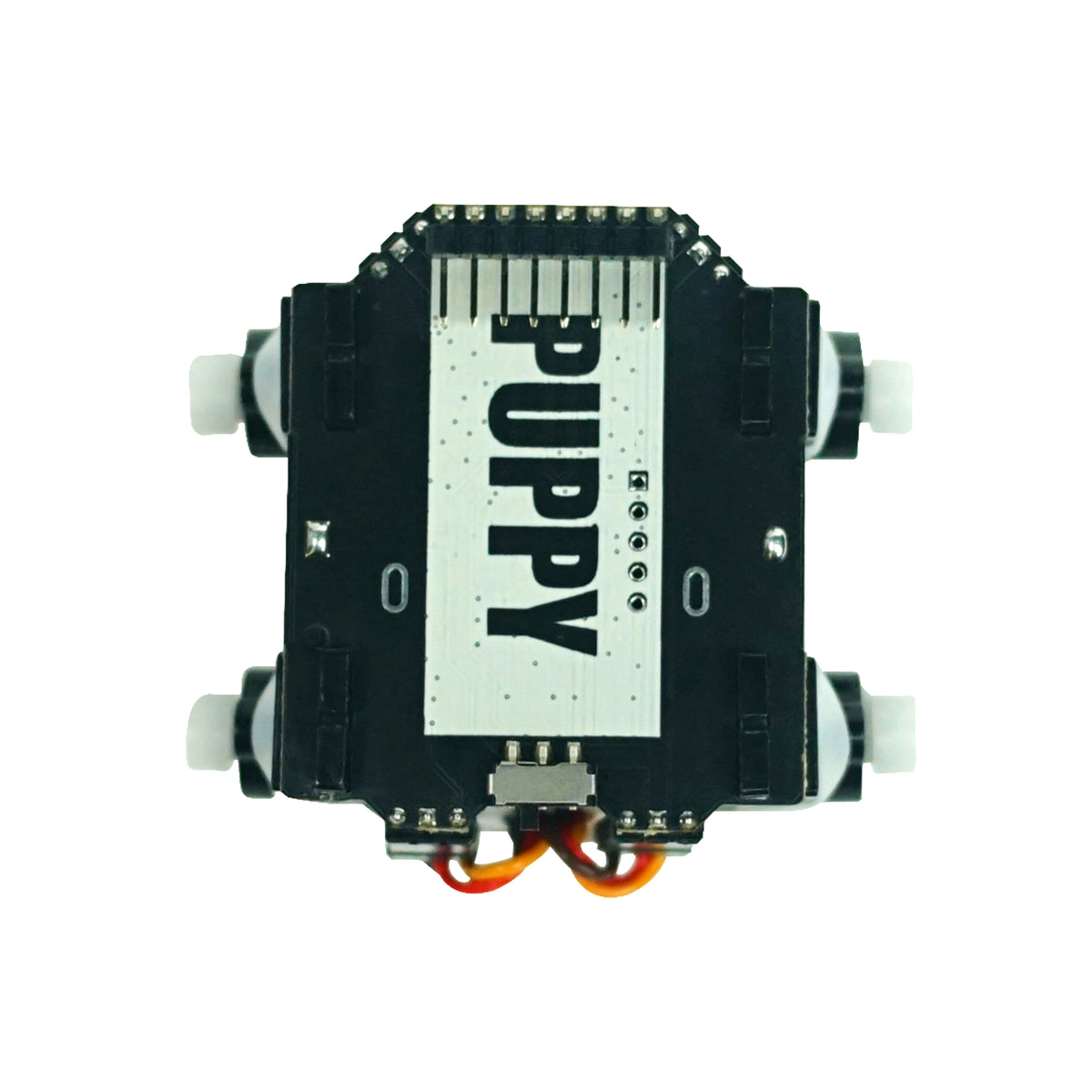
PuppyC is a programmable four-legged robot base compatible with M5StickC. It contains the STM32F030F4 micro controller,Four SG90 micro servos, a battery holder and an independent switch.
PuppyC base needs to be used in conjunction with the M5StickC controller.After the StickC is programmed, it communicates with PuppyC through the I2C protocol (0x38) to control the steering motion.
It walks slowly and is easy to control.Due to the small contact area, the movement is slow and the frictional force is as large as possible even on a soft surface.
This product is EOL now.
Product Features
- Programmable robot
- Servo controller
- Four-legs walking
- Servo angle range:0-180°
Applications
- Robotic pet
- Remote Control Robot
- Smart and cognitive toys
Include
- 1x PuppyC base
- 1x 16340 Battery(700mAh)
- 4x SG90 Servo
Specification
| Resources | Parameter |
|---|---|
| Communication protocol | I2C:0x38 |
| Net weight | 58g |
| Gross weight | 108g |
| Product Size | 52*60*35mm |
| Package Size | 106*66*42mm |