








Description
Description
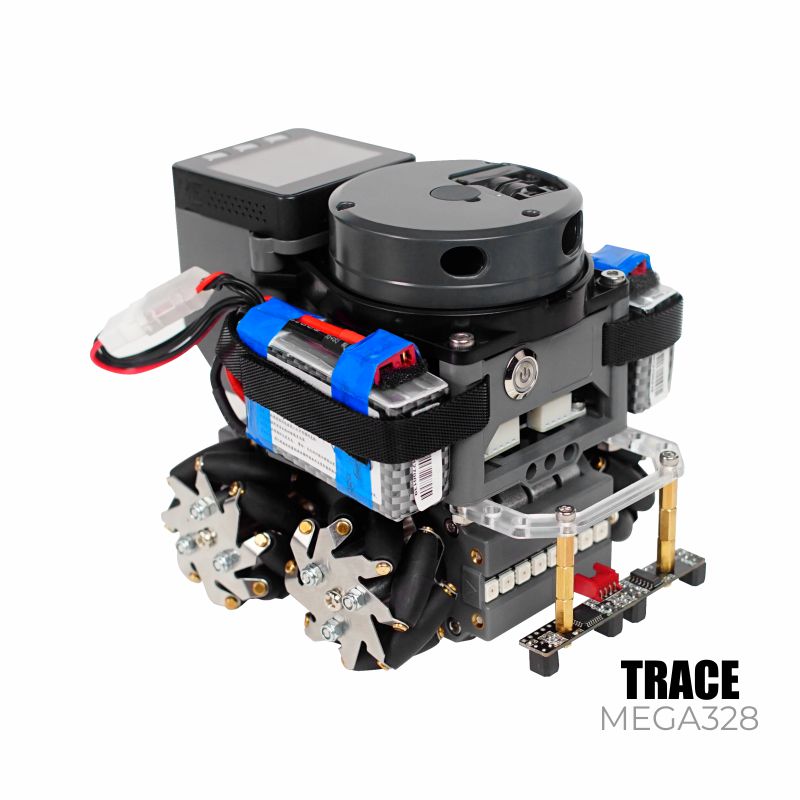
LidarBot is a powerful development kit for Automated Guided Vehicles(AGVs). Comes with a 360 Lidar sensor, 4 Mecanum wheels, M5 Core, RGB Bars and a remote conroller with Joystick panel and more。In addition, a trace kit is attached for the identification of black or white track line. With 4 Mecanum wheels, you can make it move to any direction, forward, backward, to left and to right. The Lipo Batteries enpower the Robot to run long-hours. You can display the map data, that obtained from the lidar sensor, on the screen or upload somewhere else thru Wi-Fi and program it into any format. We have implemented Real-time communication via ESP-NOW between robot and remote, Mazing-runing , self-tracing and more. If you are interest in AGV development, We especially encourage you to modify the open source code we have offered on github and enhance it yourself.
This product is EOL now, we've released the updated version NEW Lidar Bot AGV Mini Carkit Mecanum Wheels which is fully compatible with this product.
Product Features
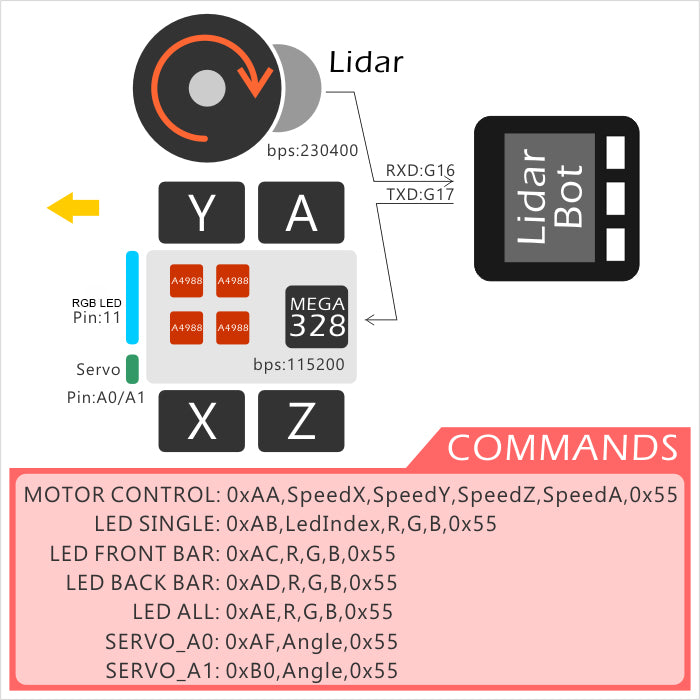
- Lidar: 8m @ 6Hz
- Programming Support
- ESP-NOW Remote
- With tracking function
- Arduino
- UIFlow (Blockly)
- Python
- ESP-NOW communication
- Mecanum wheels
- Compatible LEGO
Include
- 1x LidarBot
- 1x TRACE Kit
- 1x Remote Control Handle
- 2x Battery(1300mAh @ 11.1V)
- 1x Power Charger
- 1x Type-C USB Cable

Applications
- Indoor Navigation
- Autonomous walking maze
- Route plan
- Autopilot
Specification
| Resources | Parameter |
| Net weight | 1980g |
| Gross weight | 2140g |
| Product Size | 142*117*120mm |
| Package Size | 208*208*167mm |
Document
Contents
Customer Reviews
Love this product, good size batteries, reliable Lidar scanner
Wonderful product in beautiful retail packaging. Works out of the box with pre-programmed functions such as roaming with automatic obstacle avoidance in two speed modes. The remote also works out of the box already configured to control the bot like a standard RC vehicle. A charger is not included for the remote but it can be charged via a USB-C connection. The downside to this is that the remote will power on once a USB-C cable is connected and can not be powered off without disconnecting the cable. Other than that, perfectly happy with this purchase. I’ll be implementing custom functionality into the device soon. Note: the lidar sits about 115mm off of the ground so smaller obstacles will not be detected. I recommend getting some VL53L0X distance sensors also available in the M5 stack store to deal with that.


Thank you, Very fast shipping.